




El par de engranajes de espiral helicoidal y sinfín evolvente se ha utilizado ampliamente en transmisiones de baja potencia. Este tipo de par de engranajes es relativamente fácil de diseñar y producir. En producción, si la precisión de las piezas es ligeramente inferior o los requisitos de relación de transmisión no son muy estrictos, también es un buen método de selección.
En la actualidad, este tipo de par de transmisión no está incluido en los datos de diseño general porque su teoría aún no está completamente madura.
Este tipo de par engranado es un par de transmisión típico de contacto puntual. Desde un punto de vista microscópico, la tensión local es alta y la eficiencia es baja. Afortunadamente, el par de transmisión es bajo y los requisitos de eficiencia son bajos. Por lo tanto, es muy comercializable. Este diseño evita diversos problemas que existen en la fabricación y el montaje de engranajes sinfín.
Este artículo analiza principalmente la representación de este tipo de par de contactos moviéndose a lo largo de la dirección normal en un rango muy pequeño utilizando una animación en la dirección de movimiento del punto de contacto.
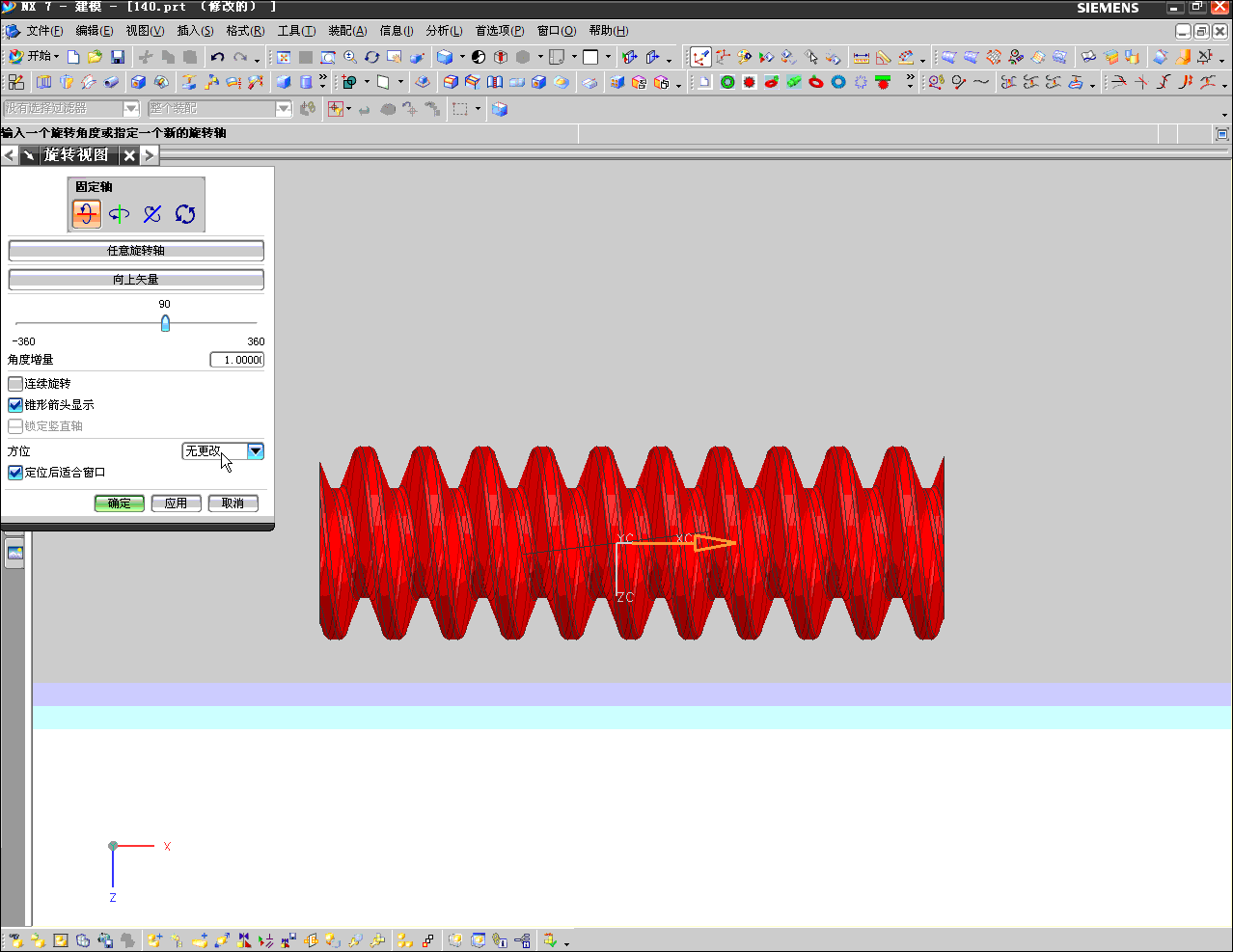
Haga un plano en la sección media del par de malla en el dibujo y proceselo en un color translúcido y contrastante en el dibujo, y luego déjelo girar un ángulo ascendente de gusano alrededor de la línea vertical desde el centro del engranaje hasta el gusano, que se encuentra en la posición del plano normal, como se muestra en la siguiente figura:
Tras el tratamiento, el par de transmisión que necesita verificar las marcas de mallado se debe cambiar a un color de contraste, y uno de ellos debe ser translúcido para que el movimiento de la posición de mallado se pueda ver claramente durante todo el proceso de simulación dinámica. Como se muestra a continuación:
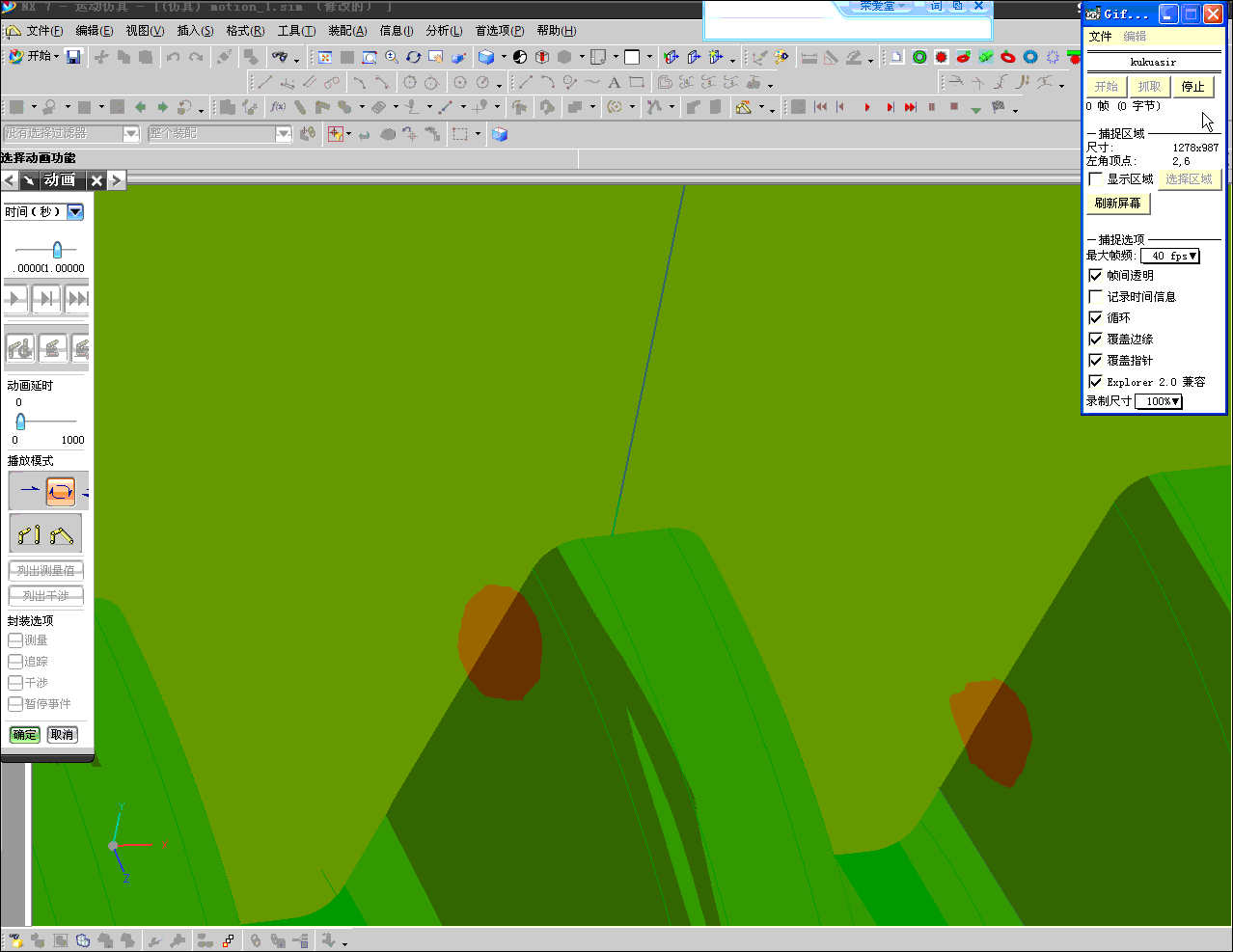
Durante el movimiento del punto de contacto de malla con color de contraste evidente, se puede observar que pasa a través de la hoja normal.
Registros calculados en el ejemplo anterior:
Registro de cálculo preliminar de un tornillo sin fin evolvente con engranaje helicoidal
datos de entrada
Módulo normal: 6 Diámetro del círculo de indexación del tornillo sin fin: 5 Número de cabeza del tornillo sin fin: 1 Número de dientes del engranaje helicoidal: 40
Ángulo de presión normal: 20 preselección de engranaje helicoidal ángulo de hélice: 6.89210257934639
Datos de cálculo
Módulo normal: seis
Módulo axial: seiscientos cuatro billones trescientos sesenta y siete mil doscientos veintitrés millones diecinueve mil treinta y cinco
Ángulo de elevación de la rosca: 6,89210257934639
Dirección espiral: el tornillo sin fin y el engranaje helicoidal están en la misma dirección
Distancia al centro del desplazamiento cero: 14,5873444603807
Distancia central del par de transmisión de entrada: 14,75
Número equivalente de dientes de tornillo: 8,27311576399391
Ángulo de presión axial del tornillo sin fin: 20,1339195068419
Coeficiente de deflexión radial del engranaje helicoidal: dos mil setecientos once
Ángulo de hélice del gusano: 83,1078974206537
Parámetros básicos del gusano 83.10789742065361
Diámetro mayor del gusano: 6,2 Diámetro menor del gusano: 3,5 Número de dientes del gusano: 1
Módulo normal del gusano: 6 Ángulo de presión normal del gusano: 20 Diámetro del círculo de indexación del gusano: 5
Coeficiente de desplazamiento radial del gusano: 0 Diámetro del círculo de la base del gusano: 1,56559093858108
Módulo del extremo del gusano: 5 Módulo axial del gusano: seiscientos cuatro billones trescientos sesenta y siete mil doscientos veintitrés millones diecinueve mil treinta y cinco
Ángulo de presión axial del tornillo sin fin: 20,1339195068419 Ángulo de presión de la cara del extremo del tornillo sin fin: 71,752752179164
Grosor normal del diente del círculo de indexación del gusano: 942477796076937 Medición de la altura del diente del círculo de indexación del gusano: seis
Ángulo de elevación de la rosca del círculo de indexación del tornillo sin fin: 6,89210257934639 Ángulo de hélice del círculo de indexación del tornillo sin fin: 83,1078974206537
Longitud efectiva del diente del gusano: 25
Cable de tornillo sin fin (axial): 1,89867562790706
Parámetros básicos del engranaje helicoidal
Diámetro mayor del engranaje helicoidal: 25,7 Diámetro menor del engranaje helicoidal: 23 Número de dientes del engranaje helicoidal: 40
Módulo normal del engranaje helicoidal: 6 Ángulo de presión normal del engranaje helicoidal: 20 Coeficiente de modificación del engranaje helicoidal: dos mil setecientos once
Diámetro del círculo de indexación del engranaje helicoidal: 24,1746889207614 Diámetro del círculo de la base del engranaje helicoidal: 22,69738911811
Módulo de la cara final del engranaje helicoidal: 604367223019035 Ángulo de presión de la cara final del engranaje helicoidal: 20,1339195068419
Ángulo helicoidal del círculo de indexación del engranaje helicoidal: 6,89210257934639 Ancho del engranaje helicoidal: 10
Paso del engranaje helicoidal (axial): 628.318530717958
Número de dientes a lo largo de la línea normal común del engranaje helicoidal: 5 valor nominal de la línea normal común del engranaje helicoidal: 8,42519
Número de dientes a lo largo de la línea normal común del engranaje helicoidal: 6 valor nominal de la línea normal común del engranaje helicoidal: 10,19647
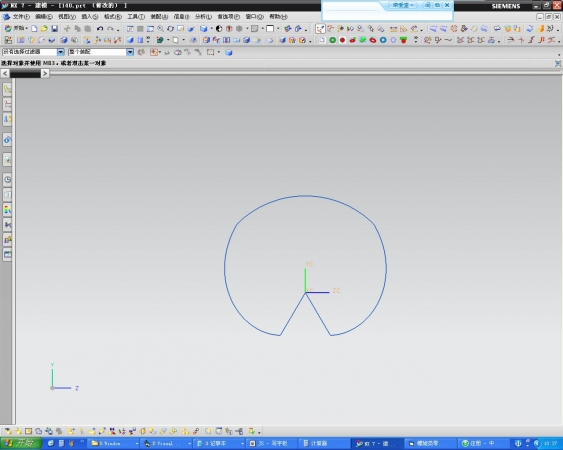
Diagrama de línea evolvente de cara final utilizado para modelar un tornillo sin fin evolvente:
Hora de publicación: 11 de junio de 2022