




Gleasonengranajes cónicos espiralesSon un tipo especializado de engranaje cónico, diseñado para transmitir potencia entre ejes que se intersecan, generalmente en un ángulo de 90 grados. Lo que distingue al sistema Gleason es su geometría dentada y método de fabricación únicos, que proporcionan un movimiento suave, una alta capacidad de par y un funcionamiento silencioso. Estos engranajes se utilizan ampliamente en transmisiones automotrices, industriales y aeroespaciales, donde la confiabilidad y la precisión son cruciales.
El sistema Gleason fue desarrollado para mejorar los sistemas rectos yengranajes cónicos zerolMediante la introducción de un diente curvo en espiral, esta forma permite un engrane gradual entre los dientes, lo que reduce significativamente el ruido y la vibración, a la vez que permite mayores velocidades de rotación y mayor capacidad de carga. El diseño también mejora la relación de contacto y la resistencia superficial, garantizando una transmisión de potencia eficiente bajo cargas pesadas o dinámicas.
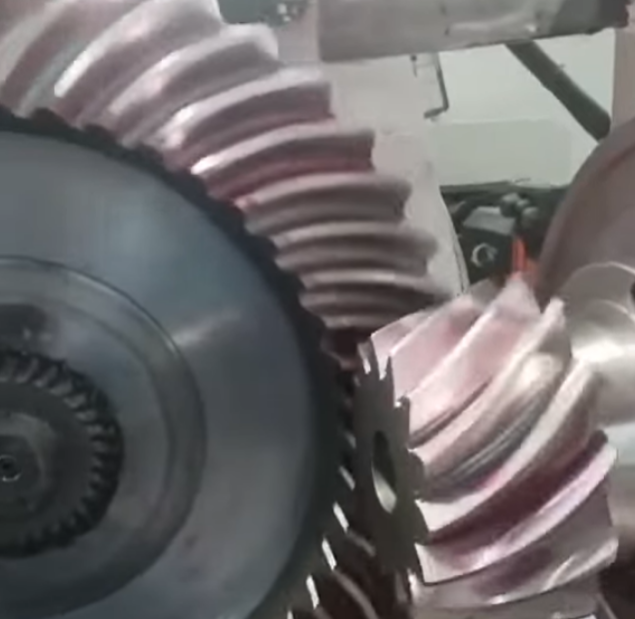
Cada par de engranajes cónicos espirales Gleason consta de un piñón y un engranaje acoplado, fabricados con geometría adaptada. El proceso de fabricación es altamente especializado. Comienza con la forja o fundición de precisión de piezas brutas de acero aleado, como 18CrNiMo7-6, seguidas de desbaste, tallado con fresa madre o conformado para generar la forma inicial del engranaje. Métodos avanzados como el mecanizado de 5 ejes, el biselado y el mecanizado en duro garantizan una alta precisión dimensional y un acabado superficial optimizado. Tras un tratamiento térmico como la carburación (58-60 HRC), los engranajes se someten a lapeado o rectificado para lograr un engrane perfecto entre el piñón y el engranaje.
La geometría de los engranajes cónicos espirales Gleason se define mediante varios parámetros críticos: ángulo espiral, ángulo de presión, distancia del cono primitivo y ancho de cara. Estos parámetros se calculan con precisión para garantizar un contacto correcto entre los dientes y una distribución de la carga correcta. Durante la inspección final, herramientas como la máquina de medición por coordenadas (MMC) y el análisis de contacto entre dientes (ATC) verifican que el juego de engranajes cumpla con la clase de precisión requerida según las normas DIN 6 o ISO 1328-1.

En funcionamiento, espiral de Gleasonengranajes cónicosOfrecen alta eficiencia y un rendimiento estable incluso en condiciones exigentes. Los dientes curvos proporcionan un contacto continuo, reduciendo la concentración de tensiones y el desgaste. Esto los hace ideales para diferenciales de automóviles, cajas de cambios de camiones, maquinaria pesada, sistemas de propulsión marina y herramientas eléctricas. Además, la posibilidad de personalizar la geometría de los dientes y la distancia de montaje permite a los ingenieros optimizar el diseño para adaptarse a limitaciones específicas de par, velocidad y espacio.
Engranaje cónico espiral tipo Gleason: tabla de cálculo clave
| Artículo | Fórmula / Expresión | Variables / Notas |
|---|---|---|
| Parámetros de entrada | (z_1,\ z_2,\ m_n,\ \alpha_n,\ \Sigma,\ b,\ T) | dientes del piñón/engranaje (z); módulo normal (m_n); ángulo de presión normal (\alpha_n); ángulo del eje (\Sigma); ancho de la cara (b); par transmitido (T). |
| Diámetro de referencia (medio) | (d_i = z_i, m_n) | i = 1 (piñón), 2 (engranaje). Diámetro medio/de referencia en la sección normal. |
| Ángulos de paso (cono) | (\delta_1,\ \delta_2) tal que (\delta_1+\delta_2=\Sigma) y (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | Calcule los ángulos del cono de acuerdo con las proporciones de los dientes y el ángulo del eje. |
| Distancia del cono (distancia del vértice del paso) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Distancia desde el vértice del cono hasta el círculo primitivo medida a lo largo de la generatriz. |
| Paso circular (normal) | (p_n = \pi m_n) | Paso lineal en la sección normal. |
| Módulo transversal (aprox.) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (\beta_n) = ángulo espiral normal; se transforma entre secciones normales y transversales según sea necesario. |
| Ángulo espiral (relación media/transversal) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = ángulo cónico medio; utilice transformaciones entre ángulos normales, transversales y espirales medios. |
| Recomendación de ancho de cara | (b = k_b , m_n) | (k_b) generalmente se elige entre 8 y 20 según el tamaño y la aplicación; consulte la práctica de diseño para conocer el valor exacto. |
| Adenda (media) | (aprox. m_n) | Aproximación de adición de profundidad completa estándar; utilice tablas de proporciones dentales exactas para obtener valores precisos. |
| Diámetro exterior (punta) | (d_{o,i} = d_i + 2a) | yo = 1,2 |
| Diámetro de la raíz | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendum (de proporciones del sistema de engranajes). |
| Espesor del diente circular (aprox.) | (s \aprox \dfrac{\pi m_n}{2}) | Para la geometría de bisel, utilice el espesor corregido de las tablas de dientes para lograr mayor precisión. |
| Fuerza tangencial en el círculo primitivo | (F_t = \dfrac{2T}{d_p}) | (T) = torque; (d_p) = diámetro de paso (use unidades consistentes). |
| Esfuerzo de flexión (simplificado) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = factor de sobrecarga, (K_V) = factor dinámico, (Y) = factor de forma (geometría de flexión). Utilice la ecuación de flexión AGMA/ISO completa para el diseño. |
| Estrés de contacto (tipo Hertz, simplificado) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p , b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}}) | Constante geométrica (C_H), módulos elásticos del material (E_i,\nu_i) y coeficientes de Poisson. Utilice ecuaciones de tensión de contacto completas para la verificación. |
| Relación de contacto (general) | (\varepsilon = \dfrac{\text{arco de acción}}{\text{paso base}}) | Para engranajes cónicos, calcule utilizando la geometría del cono de paso y el ángulo espiral; generalmente se evalúa con tablas de diseño de engranajes o software. |
| Número virtual de dientes | (z_v \aprox \dfrac{d}{m_t}) | Útil para comprobaciones de contacto/socavación; (m_t) = módulo transversal. |
| Comprobación mínima de dientes/socavado | Utilice la condición mínima de los dientes según el ángulo espiral, el ángulo de presión y las proporciones de los dientes. | Si (z) está por debajo del mínimo, se requiere un corte o herramientas especiales. |
| Configuración de la máquina/cortadora (paso de diseño) | Determinar los ángulos del cabezal de corte, la rotación de la cuna y la indexación a partir de la geometría del sistema de engranajes | Estos ajustes se derivan de la geometría del engranaje y del sistema de corte; siga el procedimiento de la máquina/herramienta. |
La tecnología de producción moderna, como las máquinas de corte y rectificado de engranajes cónicos CNC, garantiza una calidad constante y la intercambiabilidad. Al integrar el diseño asistido por computadora (CAD) y la simulación, los fabricantes pueden realizar ingeniería inversa y pruebas virtuales antes de la producción real. Esto minimiza los plazos de entrega y los costes, a la vez que mejora la precisión y la fiabilidad.

En resumen, los engranajes cónicos espirales Gleason representan la combinación perfecta de geometría avanzada, resistencia del material y precisión de fabricación. Su capacidad para ofrecer una transmisión de potencia suave, eficiente y duradera los ha convertido en un componente indispensable de los sistemas de transmisión modernos. Ya sea en los sectores automotriz, industrial o aeroespacial, estos engranajes siguen definiendo la excelencia en movimiento y rendimiento mecánico.
Hora de publicación: 24 de octubre de 2025